Formation of stable and responsive collective states in suspensions of active colloids
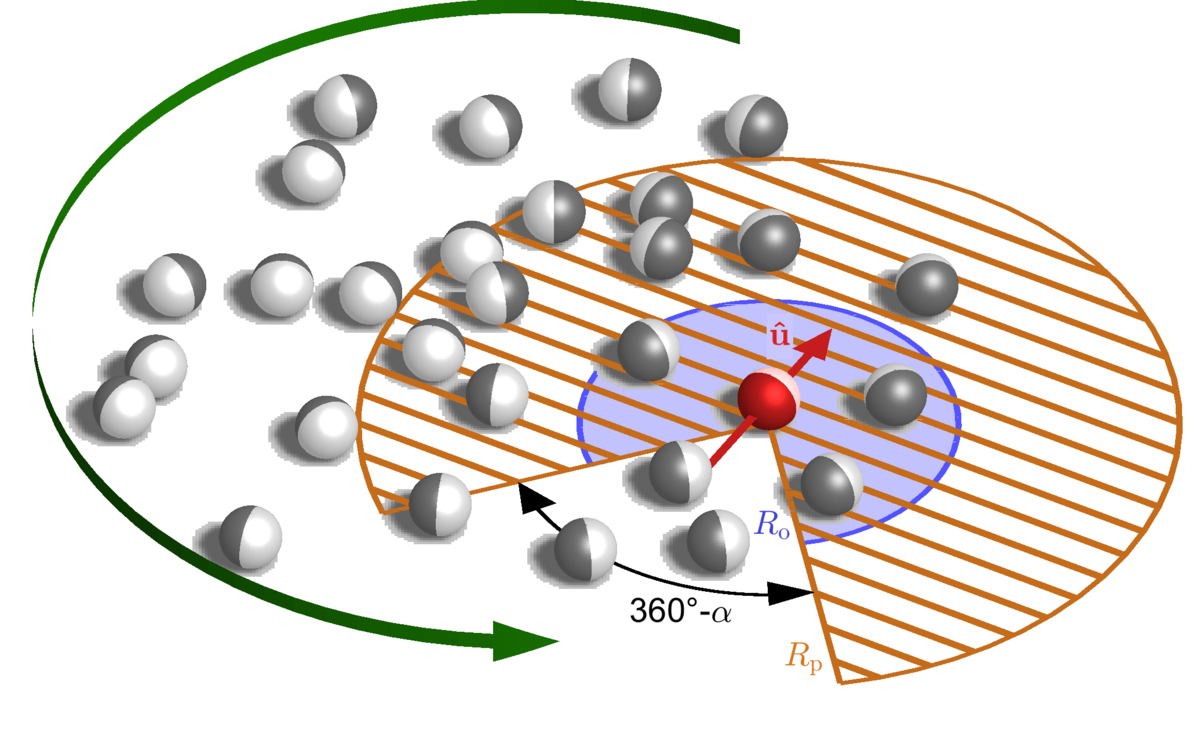
Many animal species organise into disordered swarms, polarised flocks or rotating swirls to protect from predators or optimise foraging. Previous studies suggest that such collective states are related to a critical point, which could explain their balance between robustness to noise and high responsiveness regarding external perturbations. Here we provide experimental evidence for this idea by investigating the stability of swirls formed by light-responsive active colloids which adjust their individual motion to positions and orientations of neighbours. Because their behaviour can be precisely tuned, controlled changes between different collective states can be achieved. During the transition between stable swirls and swarms we observe a maximum of the group’s susceptibility indicating the vicinity of a critical point. Our results support the idea of system-independent organisation principles of collective states and provide useful strategies for the realisation of responsive yet stable ensembles in microrobotic systems.
Experiments with freely programmable active particles, as demonstrated here, provide an effective approach to understand the behaviour of collective states in the absence of centralised control. Opposed to numerical simulations which typically consider minimalistic models and idealised interactions, particle properties under real conditions are typically more complex.
Hydrodynamic coupling, positional and orientational detection errors, or manufacturing-related variations of particle properties and even malfunctioning are just a few effects which are difficult to implement in simulations but are relevant in experimental systems. Therefore, active systems with enhanced motion-control will reduce the gap between theoretically conceived and reliably working algorithms leading to stable collective behaviour.
Formation of stable and responsive collective states in suspensions of active colloids |
T. Bäuerle, R. C. Löffler & C. Bechinger Nat. Commun, 11, 2547 (2020) |