Quorum Sensing
Organisms often adapt their behaviour to circumstances. Depending on the number of conspecifics surrounding them, they coordinate their behaviour. As a group they can accomplish tasks they could not, or only with difficulty, complete on their own. Adaptation of behaviour based on local population density is called quorum sensing – analogous to the term “quorum” in politics, determining the minimum number of individuals required to constitute a valid vote.
Many bacteria release and detect signalling molecules and can coordinate their behaviour through this exchange. If the concentration of such molecules an individual registers crosses a certain threshold, some bacteria send out light (bioluminescence), other organisms abruptly change their speed.
We study how such behavioural change influences the collective properties of a population of identical individuals. One example is an organism that drastically slows down as soon as its local population density crosses a certain threshold. This mechanism leads to a local accumulation of individuals: if the population density is high enough, they can no longer move away.
Instead of living bacteria, we use artificial microparticles that are similar in movement and size to living microorganisms. These particles are made from silica, half-coated by a thin layer of carbon film, and are a few micrometres in diameter. They asymmetrically heat up when illuminated by a laser beam and consequently put the liquid around them in motion. The situation can be compared to a mini motor boat: water is pushed backward through the rotating propeller and thus the boat moves forward.
As the microparticles can neither release nor detect signalling molecules themselves, external help is required. With the help of a computer we monitor the positions of all microparticles all the time. This information is then passed on, quasi in real time, to a laser system, which in turn briefly illuminates each particle: with high intensity for fast movement, with low intensity for slow movement.
The local density of the artificial particles determines the velocity, this way imitating the situation in living systems very well. Compared to bacteria this method has a decisive advantage: As not each individual decides about its velocity, but the computer, the decision rules can be determined precisely and can be changed almost indefinitely in this innovative experiment.
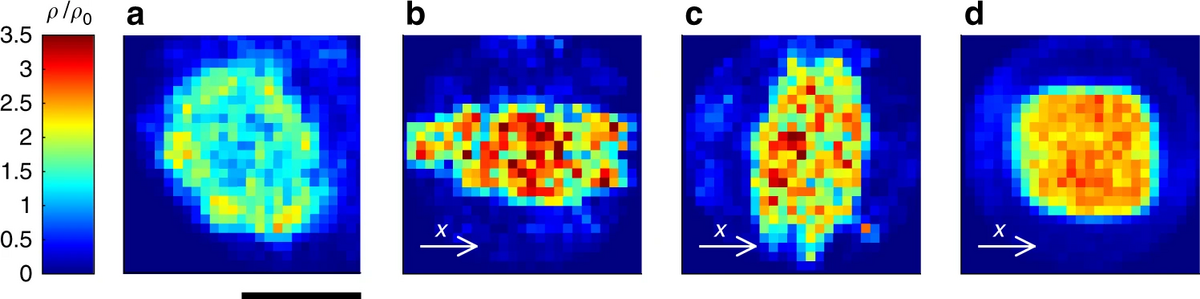
An important result of the experiment is that particles cannot form dense accumulations without behavioural rules. Another surprising discovery is the fact that particle clusters can emerge only within a sharply defined threshold band. If the threshold is too high or too low, the particles drift in different directions. Remarkably, even very small changes in the decision process have significant impacts on the form of the particle accumulation. In our experiments, we even can, for example, prompt the microparticles to organize themselves in groups that are shaped like a cigar, or in round groups with a hole in the centre.
These interaction rules are not only relevant for biological systems; we also envisage applications in the field of autonomous microrobots. These, too, will have to independently fulfil complex tasks in the future. A prerequisite is that they communicate with each other and coordinate their behaviour, as otherwise they will not be able to successfully master unexpected situations without external help.
Questions that now need to be addressed are, for example: Over what distances must individuals or robots exchange information, and what kind of information do they need to exchange to initiate collective behaviour? Is it sufficient to simply know the neighbours’ positions, or must also the direction they move in be known? Which role do time delays in the processing of such signals play, and how do chance perturbations affect the behaviour of particle swarms?
We strive to answer these and similar questions in the context of the “Centre of the Advanced Study of Collective Behaviour”, which just has been approved for funding in the context of the German Excellence Strategy.
| Self-Organization of Active Particles by Quorum Sensing rules |
| T. Bäuerle, A. Fischer, T. Speck, C. Bechinger Nat. Commun. 9, 3232 (2018) |